目指すのはドライバーのイメージどおりに走ること。三菱自動車は1992年の初代ランサー・エボリューション(ランエボ)から’07年のランサー・エボリューションXにかけて、その当時最先端の技術を投入して走りの理想を追い求めていった。
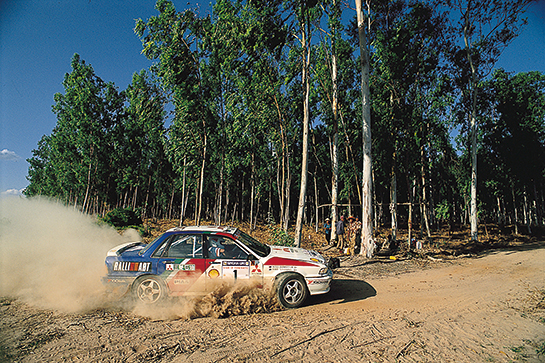
原点は’87年のギャランVR-4だ。この年、WRC(FIA世界ラリー選手権)はグループB規定からグループA規定に移行した。グループBは市販車に似た姿をしていたが、実際はパイプフレームのシャシーに市販車風の外皮を被せたモンスターマシンだった。グループAは改造範囲が狭いため、市販車が持つポテンシャルが重要になる。その点、VR-4は打ってつけだった。
VR-4はフルタイム4WD、4輪操舵の4WS、それに4輪ABSなどの最新技術を備えていた。三菱は現在でも「4輪のタイヤの能力をバランス良く最大限に発揮させて、〝意のままの操縦性〟と〝卓越した安定性〟を実現する4輪運動制御技術」の開発に取り組んでいる。その出発点となったのだ。ランエボIXまで受け継がれる4G63型の2ℓ直4DOHCターボを初めて搭載したのもVR-4だった。
WRCのベース車は、よりコンパクトで軽量なランエボに受け継がれることになった。4輪運動制御の点で進化したのは、’96年のランエボIVである。4WDの後輪左右間でトルクベクタリング(トルク移動)を行い、曲がりやすさを高めるAYC(アクティブヨーコントロール)を初めて採用した。’01年のランエボVIIでは、前後輪間のトルク配分を行なうACD(アクティブセンターデフ)を採用し、4輪運動制御を進化させた。
「全天候型スポーツセダン」として初めてS-AWC(車両運動統合制御システム)を搭載したのがランエボXだ。それまで状況に応じて個別に制御していた4WDとAYC、ABS&ASC(アクティブスタビリティコントロール=4輪ブレーキ制御)を垣根なくシームレスに統合することにより、どんな路面を誰が走っても自分が思っているとおりに動く状態を目指した。アクセル操作、ハンドル操作、ブレーキ操作に対して思いどおりに動いてくれれば、安心だし、気持ちいい。それが、三菱の目指す「走り」だ。
ランエボXは’15年に生産が終了した。このクルマの魅力はS-AWCだけではなかった。市場規模の大きいグループN規定のレースを念頭に置き、長年使い続けた4G63型エンジンに別れを告げ、低回転域のレスポンスを重視した2ℓ直4ターボエンジン、4B11を新規に開発した。ギャラン・フォルティスが搭載するユニットと型式名は同じだが、多くが専用部品で構成されていた。6速デュアルクラッチトランスミッションのSSTを採用したのも、エボ(進化)の面目躍如だった。
ランエボは三菱自動車のラインアップから消えたが、4輪運動制御技術は現行ラインアップに生きている。例えば、エクリプスクロスのブレーキAYC(旋回時に前側内輪にブレーキをかけてヨーを発生)は、ランエボXと同じ制御理論に基づいている。用いるデバイスは異なるが、デリカD:5も、アウトランダーPHEVも「思ったとおりに動く安心感」を提供する意味で、狙いは同じだ。
これで終わり、ではない。’17年の東京モーターショー(TMS)に出展したe-EVOLUTION CONCEPT(※)は、フロントにシングル、リヤにデュアルモーターを搭載してフル電動化したのに加え、ブレーキも電動化したS-AWCの進化形を搭載している。電気駆動の良さであるレスポンスの高さを生かすことで、操作に対してクルマが遅れなく追従し、誰でももっと楽に、思いどおりに動けるようになる。’19年のTMSに出展したMI-TECH CONCEPT(※)は、リヤだけでなくフロントもデュアルモーターとしたS-AWCの最新事例だ。ギャランVR-4から始まり、ランエボに受け継がれて磨かれた4輪運動制御技術は、現在も着実に進化を遂げている。次の一手が楽しみだ。

ギャラン VR-4(1987)

ランサーエボリューションⅣ(1996)

ランサーエボリューションⅦ(2001)

ランサーエボリューションⅧ(2003)

ランサーエボリューションⅨ(2005)
